1. Teknikaj karakterizaĵoj deeVTOL-motoro
In distribuita elektrapropulso, motoroj pelas plurajn helicojn aŭ ventolilojn sur la flugiloj aŭ fuzelaĝo por formi propulssistemon, kiu provizas puŝon al la aviadilo. La potencdenseco de la motoro rekte influas la utilan ŝarĝkapaciton de la aviadilo. La potenckapacito, fidindeco kaj media adaptiĝkapablo de la motoro estas gravaj faktoroj por determini la dinamikajn karakterizaĵojn kaj sekurecon de la elektre propulsita aviadilo. La elekto de elektraj veturiloj, virabeloj kaj eVTOL-motoroj estas malsama pro malsamaj kostoj, aplikaj scenaroj kaj aliaj kialoj [1].

(Fonto de la foto: oficiala retejo de Network/Safran)
1) Elektraj veturilojpli permanenta magnetosinkronaj motoroj,Permanentaj magnetaj motoroj kun pli alta efikeco kaj pli alta tordmomanto povas provizi pli bonan vetursperton. Samtempe, la alta potencdenseco de permanentaj magnetaj motoroj ankaŭ povas helpi elektrajn veturilojn atingi pli altan potencon sub la sama volumeno.
(2) UAV: ofte uzata senbroŝaMotoro de kontinua kurento.La senbroŝa kontinukurenta motoro havas malaltan pezon kaj bruon, kaj la bontenadokosto estas malalta, kio taŭgas por la flugpostuloj de senpilotaj aviadiloj; Due, la rapideco de la senbroŝa kontinukurenta motoro estas pli alta, kio taŭgas por la altrapidaj flugbezonoj de virabeloj. Ekzemple, DJI uzas senbroŝajn motorojn.
(3) eVTOL: Pli altaj postuloj por motora efikeco kaj tordmomanta denseco, permanenta magneta sinkrona motoro estas tre promesplena solvo por elektra propulsa potencosistemo, ĉar la aksa flukso permanenta magneta motoro havas altan utiligan indicon de radiala spaco, kaj la potencodenseco kaj tordmomanta denseco havas avantaĝojn en kazo de malgranda longo-diametro-proporcio. Nunaj elektraj VTOL-aviadiloj, kiel ekzemple Joby S4 kaj Archer Midnight, ĉiuj adoptas permanentajn magnetajn sinkronajn motorojn [1].
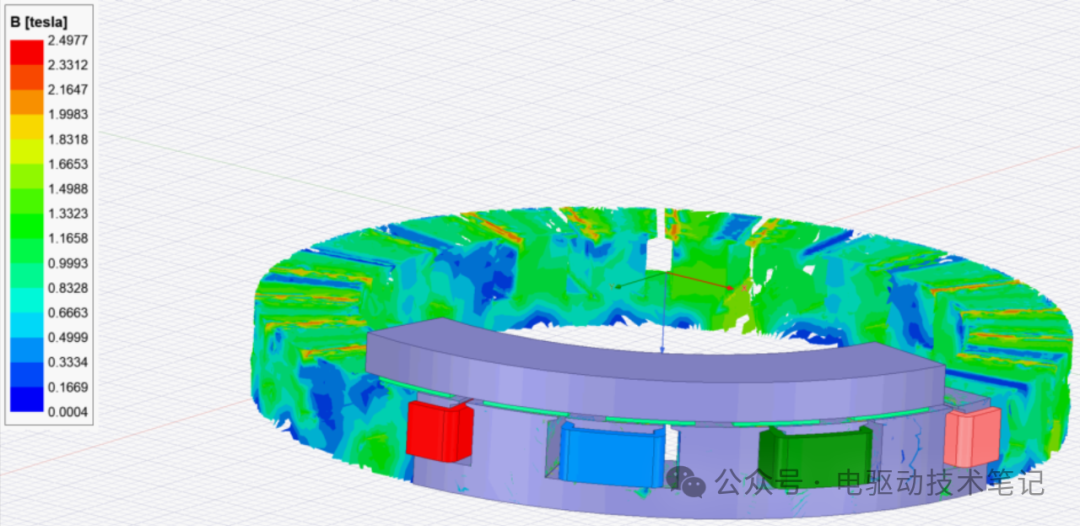
La sekva figuro montras la nuban bildon de fiksa rotora magneta indukintenseco de unu-statora unu-rotora aksa flua motoro
La sekva figuro estas komparo de parametroj de motoroj por elektraj aviadiloj kaj elektraj veturiloj.

2. Tendenco de disvolviĝo de eVTOL-motoro
Nuntempe, la ĉefa evoluiga tendenco de la eVTOL-potencosistemo estas redukti la pezon de la motorstrukturo kaj la helppezon de la malvarmiga sistemo per plibonigo de la elektromagneta dezajnteknologio, termika administrada teknologio kaj malpeza teknologio, kaj konstante plibonigi la potencdensecon de la motoro kaj la potenckapaciton en vasta gamo de variaj kondiĉoj. Laŭ la "Esplorado kaj Evoluigo de Flugveturiloj kaj Ŝlosilaj Teknologioj", la aviada propulsmotoro sukcesis atingi la nominalan potencdensecon de la motorkorpo pli ol 5kW/kg per uzado de izolaj materialoj kun pli altaj temperaturlimoj, permanentaj magnetaj materialoj kun pli alta magneta energidenseco kaj pli malpezaj strukturmaterialoj. Per plibonigo de la elektromagneta strukturdezajno de la motoro, kiel ekzemple la uzo de Halbach-magneta aro, senfera kerna strukturo, Litz-drata volvaĵo kaj aliaj teknologioj, same kiel plibonigo de la varmodisradiada dezajno de la motoro, oni atendas, ke la nominala potencdenseco de la motorkorpo povos atingi 10kW/kg en 2030, kaj la nominala potencdenseco superos 13kW/kg en 2035 [1].

3. Komparo de pure elektraj kaj hibridaj itineroj
Kompare kun la pure elektra itinero kaj la hibrida itinero, laŭ la nuna elekto de koncernaj fabrikantoj, la hejma eVTOL-projekto baziĝas ĉefe sur la pure elektra skemo, limigita de la energidenseco de litio-jonaj baterioj, kaj la malalt-pasaĝera eVTOL estas la plej bona alteriĝa scenejo de pure elektra propulsteknologio. Eksterlande, kelkaj fabrikantoj jam anticipe ellaboris la hibridan planon kaj gvidis en pluraj raŭndoj de testado kaj ripetado. Kiel videblas el la sekva tabelo, la hibrida skemo estas evidente pli forta rilate al eltenivo-Angulo, kaj povas atingi pli da aplikoj en la scenaro de mez-longaj distancoj kaj malaltaj altitudoj en la estonteco [1].
Afiŝtempo: 27-a de februaro 2025